Generation of Limit Cyles
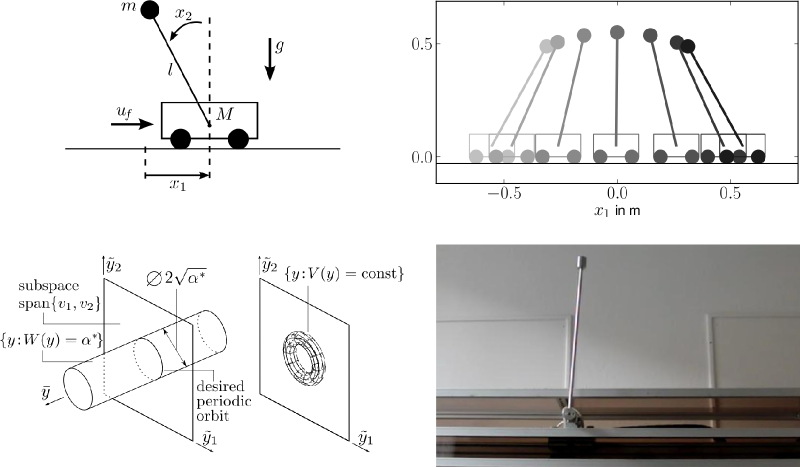
Controllers are typically designed to stabilize given operating points. However, the closed-loop system can exhibit oscillations due to unmodeled discontinuties such as backlash or dry friction. As an alternative we suggest the design of a controller such that the closed-loop control systems contains a stable limit cycle with prescribed amplitude, frequency and rate of convergence. Our approach has been verified on a test bench for an inverse pendulum on a cart.
Publications
- Knoll, C.; Röbenack, K.: Generation of stable limit cycles with prescribed frequency and amplitude via polynomial feedback.
In: Proc. of the 9th International Multi-Conference on Systems, Signals and Devices, Chemnitz, 2012. Best Paper Award. - Knoll, C.; Röbenack, K. (2012), Orbital stabilization of a class of underactuated mechanical systems.
Proc. Appl. Math. Mech. (PAMM), 12: 711-712. - Knoll, C.; Röbenack, K.: Robust Generation of Desired Periodic Orbits: From Electrical Oscillators in the Phase Plane to Underactuated Systems of Higher Order.
In: Proc. Nonlinear Dynamics of Electronic Systems 2012 (NDES 2012), S. 78-81, Wolfenbüttel, 2012. - Knoll, C.; Röbenack, K.: Stable Limit Cycles with Specified Oscillation Parameters Induced by Feedback: Theoretical and Experimental results.
Transactions on Systems, Signals and Devices, 2013, vol. 8, no. 1, pp. 127-144, Shaker Verlag, Aachen. ISBN: 978-3-8440-2254-4.